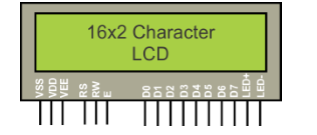
Pin configuration:
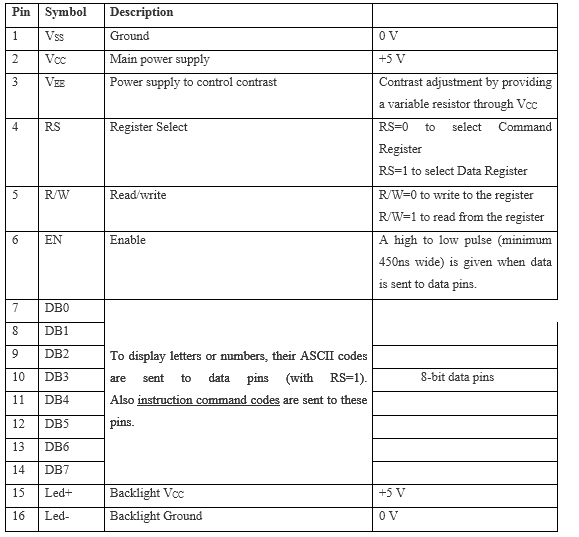
VCC, VSS and VEE:
RS (REGISTER SELECT):
RW (READ/WRITE):
EN (ENABLE):
D0-D7 (DATA LINES):

THEORY FOR CUSTOM CHARACTER GENERATION:
16 x 2 LCD
20 x 1 LCD
20 x 2 LCD
20 x 4 LCD
40 x 2 L CD

Description:

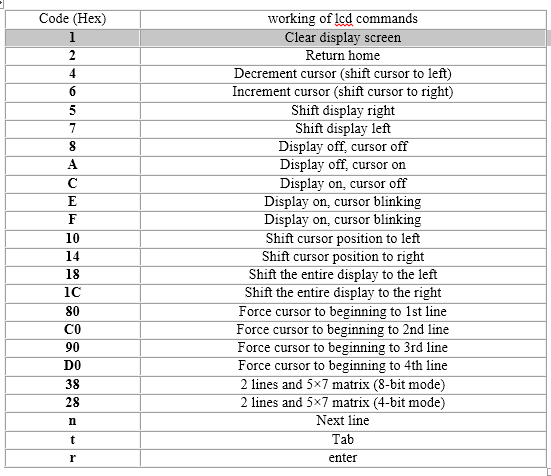
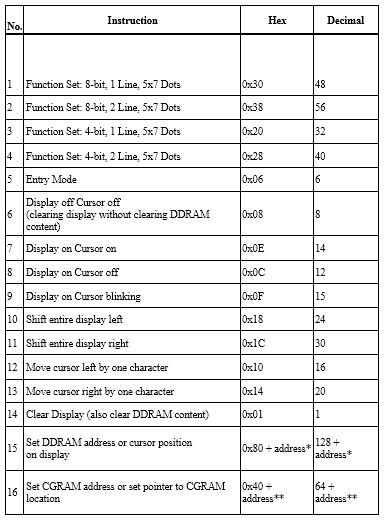
LCD COMMAND CODES:
Programming Steps:
Applications
/* Name : main.c
* Purpose : Source code for BUZZER Interfacing with PIC18F4550.
* Author : Gemicates
* Date : 2017-06-12
* Website : www.gemicates.org
* Revision : None
*/
#include <htc.h> // Header file for PIC18F4550
#define _XTAL_FREQ 12000000 // 12MHZ
#define input PORTD // PORTD as input
#define Buzzer PORTCbits.RC0 // To set a single pin(RC0) as output
// __CONFIG(PLLDIV = 5,CPUDIV = OSC1 / 2,USBDIV = 2,FOSC = HIGH_SPEED HS);
// ,FCMEN = OFF,IESO = OFF,PWRT = OFF,BOR = OFF,BORV = 3,VREGEN = OFF,WDT = OFF,WDTPS = 1:32768,CCP2MX = ON,PBADEN = OFF,LPT1OSC = OFF,MCLRE = ON,STVREN = ON,LVP = ON,ICPRT = OFF,XINST = OFF,DEBUG = OFF,CP0 = OFF, CP1 = OFF, CP2 = OFF, CP3 = OFF,CPB = OFF,CPD = OFF,WRT0 = OFF, WRT1 = OFF, WRT2 = OFF, WRT3 = OFF,WRTC = OFF,WRTB = OFF,WRTD = OFF,EBTR0 = OFF, EBTR1 = OFF, EBTR2 = OFF, EBTR3 = OFF,EBTRB = OFF);
#pragma config WDT = OFF
void delay(int msec) // delay function
{
int i,j;
for(i=0;i<msec;i++)
for(j=0;j<1275;j++);
}
void main()
{
TRISD = 0xff; // PORTD as output
TRISC = 0Xfe; // Upper bits as input and Lower bits as output.
while(1)
{
switch(input) // Switch statement
{
case 0xFF:
Buzzer = 0; // Buzzer ON condition
break;
case 0xFD:
Buzzer = 1; // Buzzer OFF condition
// delay(100);
// Buzzer = 1;
break;
}
}
}